传统的道路环境数据集通常仅包含道路场景的视频数据,然而为了探究无人驾驶汽车的全新框架,我们建立了包含更丰富信息的Road-Vehicle Dataset (RVD)。RVD数据集包含了丰富的道路场景视频数据,也包含同步采集的车辆状态信息及驾驶员行为数据。本数据集采用三个彩色相机安装在车辆前部用于采集道路场景数据。通过车载OBD接口,同步记录车辆相关状态信息。方向盘转角通过安装在方向盘上方的编码器记录。数据集共包含在不同道路环境条件下采集的近20万组样本。在数据集中,我们提供了超过4万张人工标记的图片。

数据采集平台
传感器具体配置:
IDS UI-5240CP color cameras, 1.31 Megapixels, 1/1.8" e2v CMOS, global shutter
KOWA LM3NCM megapixel lens, 3.5mm, horizontal angle of view 89.00 , vertical angle of view 73.8
NovAtel ProPak6 Triple-Frequency GNSS Receiver, TERRASTAR-C accuracy 4cm
OXTS RT2000 inertial and GNSS navigation system, 6 axis, 100Hz
RVD数据集具体包括:
1)丰富的道路场景图像数据:图像数据涵盖了不同车道数量的城区道路与高速道路。同时,数据集涵盖了多种天气状况,包括:晴天、阴天、黑夜、雨雪天等。总体的图像样本数量达到了146980张。
2)车辆状态数据:我们实时收集记录了超过一百种属性的车辆状态数据,包含速度,姿态等。
3)驾驶员行为数据:我们实时记录了驾驶员对车辆的的控制行为,包括方向盘转角及油门控制。
4)人工标记数据:在采集到的图像数据中,我们人工标记了车道线位置,以及场景中障碍车辆位置。数据集中共提供46621张人工标记图片。
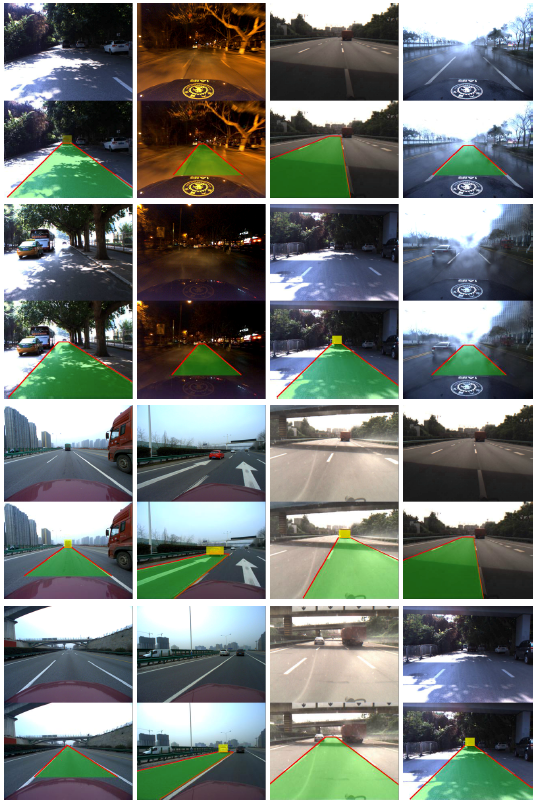
数据集示例
数据下载链接://pan.baidu.com/s/1bE4gME
获取更多信息,请联系:[email protected]